|
除草机器人虚拟仿真实验 |
|
浏览次数:[7367] |
|
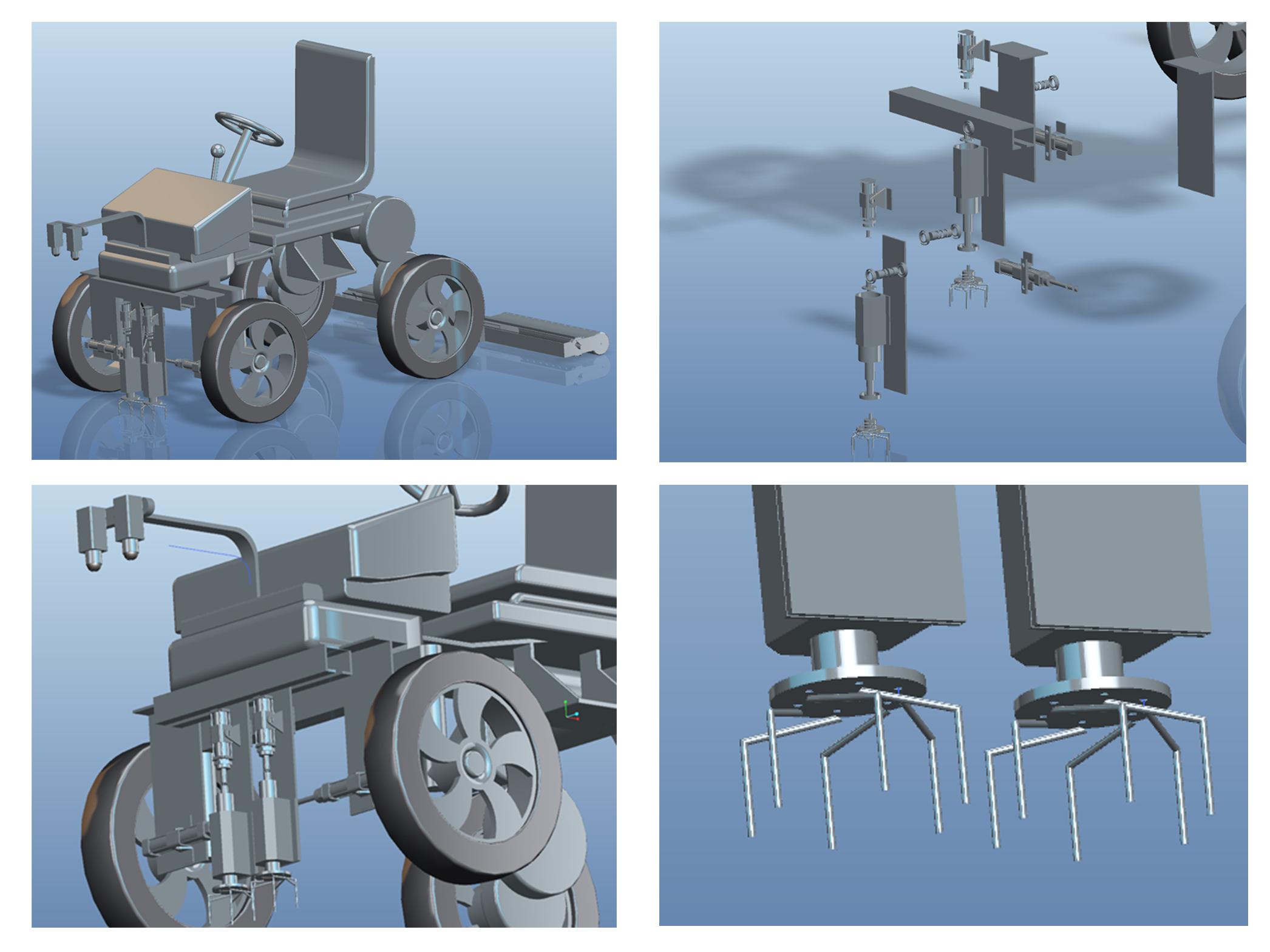
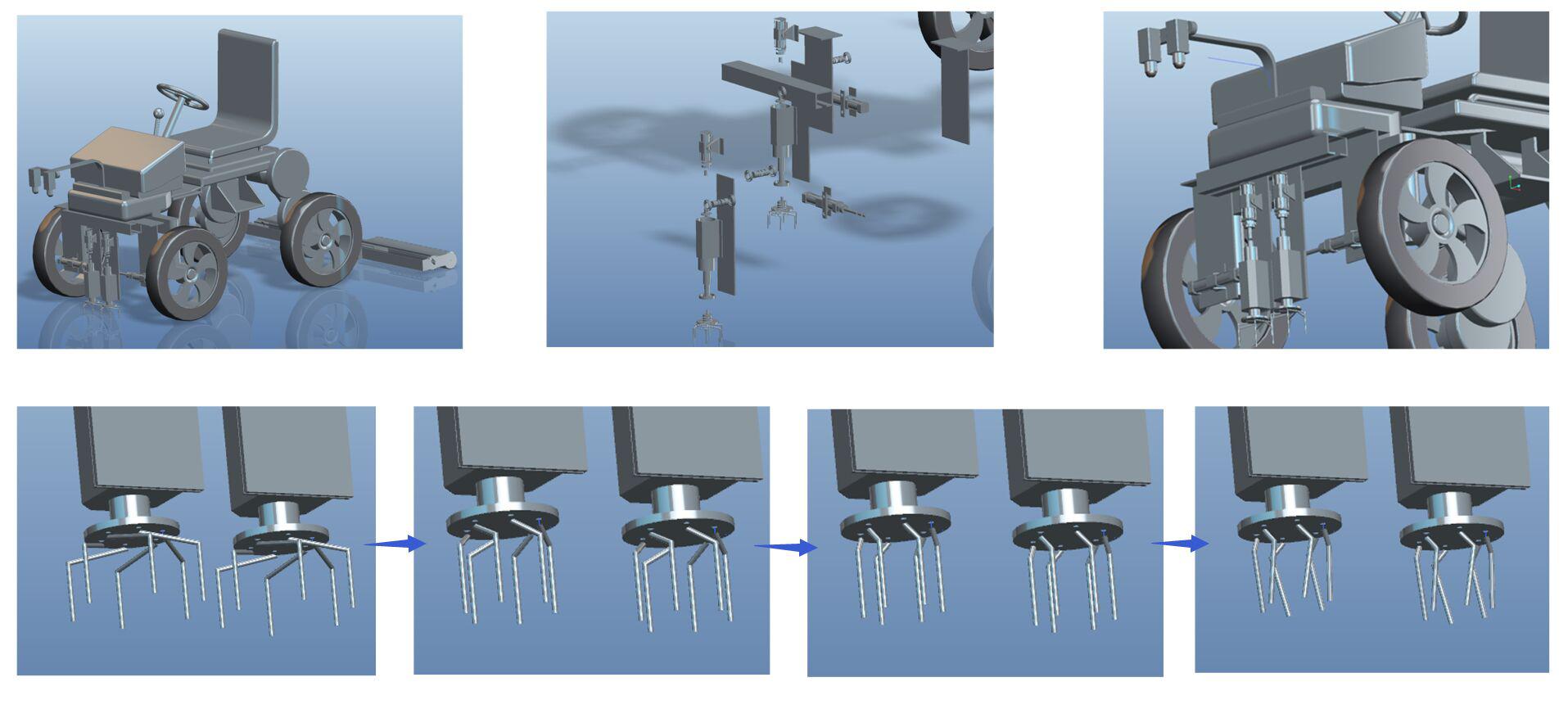
Ø 实验意义 除草机器人是一种新型农业机械, 综合了多学科理论与技术,为培养复合型人才提供了实验平台。目前国内对除草机器人的研究,大多局限于单独对行内杂草、行间杂草进行除草的研究,因此设计行内除草和行间除草可同时进行的除草机器人的机构设计及仿真实验作为教学手段非常有必要。 Ø 实验内容 n 建模设计除草机器人除草零件和机构; n 对零件三维模型、标准件装配成装配体; n 建立除草机器人机构爆炸视图; n 检测除草机器人机构是否干涉。 Ø 实验功能和效果 n 通过三维建模实验,可以克服室外农作物除草的条件限制,让学生在实验室室内开展杂草智能识别,综合应用数字图像处理方法来解决生产中的实际问题; n 通过仿真实验,通过仿真实验,学生可以巩固结构仿真和虚拟设计知识,熟练使用建模方法和软件,并能够结合实际情况设计合适的除草机构; n 通过三维建模实验,学生可以了解机器人的结构形式与特点,并掌握相关机构设计; n 通过建立爆炸图,让学生对机构进行更加直观地了解,再使用Pro/e的Mechanism模块对除草机器人进行运动仿真,并检测动态干涉情况,考虑实际情况装配问题; n 通过三维建模,得到了除草机器人的三维模型和爆炸图,如下图所示。
三维建模装配和爆炸图
n 直观地表达了除草机器人的前爪除草过程
前爪除草过程图 n |