|
林果采摘机作业虚拟仿真实验 |
|
浏览次数:[6311] |
|
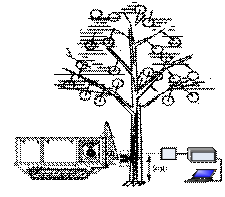
Ø 实验意义 林果采摘机械是经济林果的整个生产环节和过程中所需要的重要机械设备。林果采摘机器人,采用振动方式使果实与植株分离,成本低,生产效率比人工显著提高。林果采摘机器人采摘作业虚拟仿真实验可通过设置夹持部位、振动频率、采收树种、树木形状等参数,利用振动原理进行林果的收获,快速、有效地分离成熟果实,克服了林果浪费、噪音高、难重复、自然环境和生产条件受限多等缺点。通过林果采摘机器人采摘作业虚拟仿真实验,可展示干果或浆果等林果的振动采收机器人工作过程,集干果或浆果脱落与收集为为一体的工作原理,让学生直观了解果实类型(干果或浆果)、振动头悬臂结构、采收机器人的夹持机构形式(平行杠杆式、平移式)、驱动形式、接持机构、振动频率等参数对采收效率的影响。 Ø 实验内容 n 利用虚拟样机技术模拟林果采摘机器人采摘作业过程; n 果实的颜色,果树的类型和尺寸对采摘效果的影响; n 通过仿真观察到的结果,分析各个参数对通过性能的影响因子,决定林果采摘机器人最优设计参数。
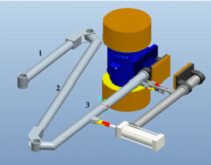
振动采摘作业模拟及振动采摘机构模拟
振动采摘作业过程模拟 Ø 实验功能和效果 n 利用虚拟样机技术建立林果采摘机器人三维模型,通过对作业过程的运动仿真,更直观认识作业原理和作业机构核心部件三维设计; n 通过行进过程采摘模拟实验,结合运动载体,确定动态参数变化、运动速度对作业效率影响,林果类型、果树尺寸对采摘作业效果的影响; n 通过仿真实验,提高学生机构动力学分析和运动学分析能力。 |