
|
伺服控制系统虚拟仿真实验 |
|
浏览次数:[4172] |
|
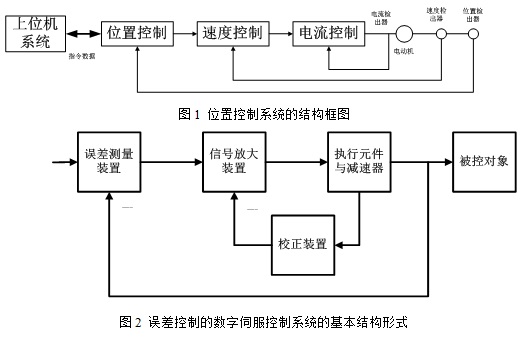
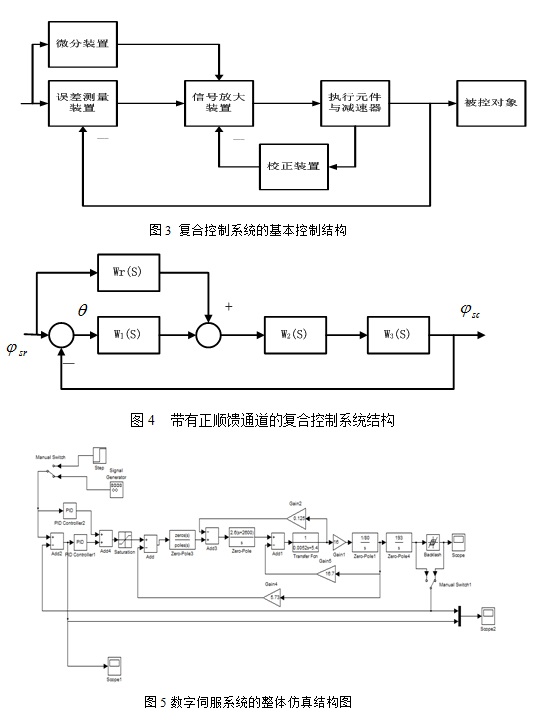
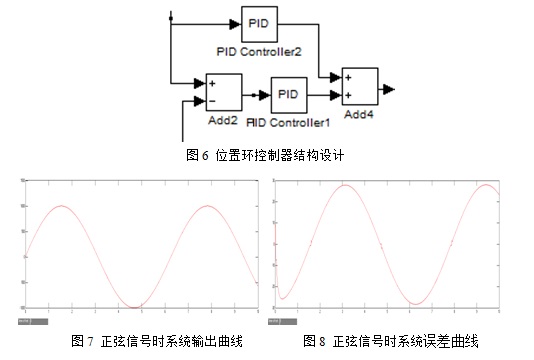
Ø 实验意义 通过此次伺服系统的仿真和实际系统的实验,让学生对伺服系统、特别是位置控制的伺服系统在其结构、控制方式等方面有了更加深刻的理解。也让同学们更加的认识到了伺服系统的重要作用,高效率的伺服系统总能够很好的让系统的输出很好的跟随着输入信号,进而复现给定信号,控制系统使得系统按照需要的特点进行运转。 Ø 实验内容 n 对系统进行理论分析(数字伺服、控制结构的选择) n 伺服系统仿真实验 Ø 实验功能和效果 仿真实验系统中,对PID参数调节时,知道控制部分的各个功能后,在仿真实验系统中,在参数接近实验要求时,固定某一参数,对另一参数微调,进而找出另一参数最优时的参数值,然后固定这两个参数,调节第三个参数;但是由于系统是对三种不同输入都有一定的性能要求,这就使得在调解时,在各个不同输入时的各个状态之间切换调节,已选择系统整体最优时的参数作为最终参数值。当系统仍然不能够满足要求时,考虑调节前馈中的微分系统,继而使得系统能够满足要求。
|
版权所有:南京林业大学 现代林业技术装备虚拟仿真实验教学中心 技术支持:南京先极科技有限公司 [网站管理]