
|
工业机器人应用虚拟仿真实验 |
|
浏览次数:[8364] |
|
Ø 实验内容 n 机器人机构设计及选配: 利用机器人仿真软件构建各种工业机器人的三维模型,了解各种机器人的构造和载荷特性; n 机器人运动学仿真:进行机器人运动学仿真,包括直角空间运动,关节空间运动,运动速度调节,位姿信息查看等; n 机器人离线编程与轨迹规划:对多自由度工业机器人进行轨迹规划并实施实际的搬运、焊接作业控制。
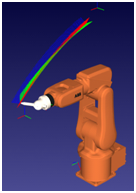
工业机器人结构设计
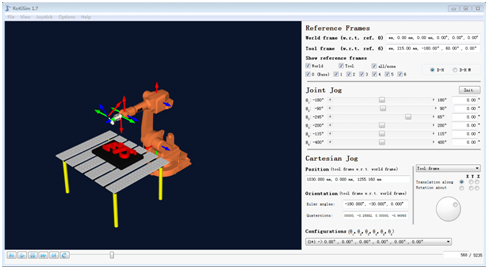
工业机器人运动学仿真实验
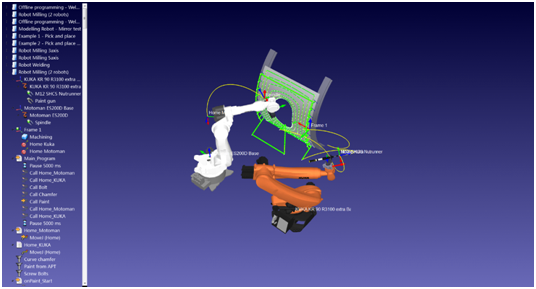
工业机器人生产作业仿真 Ø 实验功能和效果 n 机器人机械结构设计:了解工业机器人的基本概念和工作原理,掌握工业机器人结构设计,了解各种机器人结构特点与工作空间; n 机器人基本运动仿真,利用操作界面了解机器人各坐标系之间联系,控制机器人在直角空间或关节空间运动,观察末端执行器位置与姿态,加深对机器人运动学知识掌握,增加了对机器人直角空间运动,关节空间运动的感知性,便于同学们更好地掌握坐标系建模方法和机器人运动学正解和逆解原理; n 可以根据机器人工作环境,建立机器人工作站,实现如焊接、搬运等作业。规划自动化生产线这类在教学、生产实践中需要用高昂设备实现的功能。 |
版权所有:南京林业大学 现代林业技术装备虚拟仿真实验教学中心 技术支持:南京先极科技有限公司 [网站管理]